Dans ce TD, nous utiliserons les développements de TD-3 (en particulier Calibrator et CpuLoop) et TD-4 pour mettre en évidence le phénomène d’inversion de priorité abordé dans le cours Multitâches-1. Référez-vous au cours Multitâches-2 et la documentation de référence Posix pthread pour le paramétrages possibles d’un pthread_mutext_t.
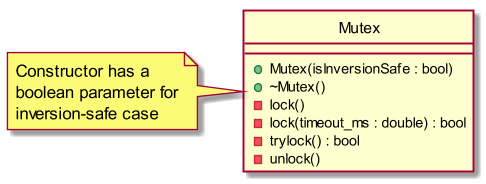
Complétez la classe
Mutexavec une option de protection contre l’inversion de priorité par héritage de priorité comme indiqué sur la figure 1.
Programmez le scénario proposé dans le cours Multitâches-1 et montrez par la mesure que la tâche A (la plus prioritaire) termine son exécution plus rapidement lorsqu’on utilise un mutex protégé contre l’inversion de priorité.
ATTENTION: Le processeur étant multicore, pour mettre en évidence l’inversion de priorité, il est nécessaire d’occuper tous les cores à 100% sauf un et faire tourner votre TD sur cet unique core laissé libre. Par exemple, sur un processeur quad-core, vous devez faire tourner 3 threads à haute priorité avec une boucle qui occupe le CPU à 100% (par exemple une boucle infinie qui incrémente un compteur) pour que les tâches du TD tournent sur l’unique core laissé libre.