Attention: les diagrammes de classes UML ne constituent qu'une vue partielle qui indique comment architecturer vos classes, mais ne représentent pas nécessairement ces classes de manière exhaustive.
Classe Chrono
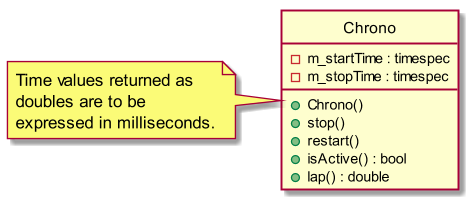
La classe Chrono implémente les fonctionnalités de mesures de temps d’un chronomètre. Son interface est définie par la figure 1. L'implémentation des méthodes de la classe Chrono doit utiliser la librairie des fonctions timespec_ développée à la question (a) du TD-1.
- À sa création, le chronomètre initialise son temps de démarrage
m_startTimeau temps courant par un appel àrestart(). - Ce temps de démarrage peut toujours être réinitialisé au temps courant par un appel à la méthode
restart(). - L’appel de
stop()fixe la valeur dem_stopTimeau temps courant. - On considère que le chronomètre est actif tant que
stop()n’a pas été appelé après un appel àrestart(). - On considère que le chronomètre est désactivé tant
restart()n’a pas été appelé après un appel àstop(). - Si le chronomètre est actif, l’appel de
lap()renvoie le temps courant (en millisecondes) écoulé depuis le dernier appel àrestart(). - Si le chronomètre est désactivé, l’appel de
lap()renvoie le temps (en millisecondes) écoulé entre les derniers appels àrestart()etstop().
Implémentez la classe
Chronoen C++ en utilisant vos fonctionstimespec_.
Testez votre classe par exemple en utilisant votre propre montre.
Classe Timer
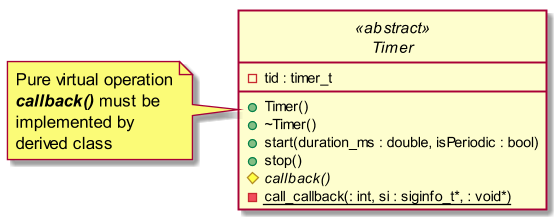
L’objectif est de programmer une classe Timer qui encapsule les fonctionnalités d’un timer Posix. La classe Timer doit implémenter l’interface définie par la figure 2. Cette classe est abstraite puisque l’opération callback() ne peut être implémentée au niveau de la classe Timer . En vous référant à la partie du cours concernant les timers POSIX, écrivez le code de la classe Timer en respectant les spécifications suivantes:
- Toutes les initialisations jusqu’à la création du timer POSIX doivent être effectuées dans le constructeur
Timer(). - Tous les objets créés dans les constructeurs doivent être détruits dans le destructeur
~Timer(). - Les 2 paramètres de la méthode
start()indiquent la durée du compte à rebours du timer et si le timer doit se réarmer périodiquement. - Si le timer est démarré, la méthode
stop()arrête le compte à rebours du timer. S’il n’est pas démarré, l’appel destop()n’a aucun effet. - Pour chaque application, l’opération
callback()doit être implémentée au niveau d’une classe spécifique dérivant de la classeTimer. - La fonction
call_callback()est une fonction de classe qui doit donc être déclaréestaticen C++. En effet, la librairie des timers POSIX impose que le handler d’un timer doit être une fonction C ayant une signature bien précise. On ne peut pas utilisercallback()comme handler pour les timers POSIX car toute méthode non statique d’une classe possède (en tant que fonction C) un premier paramètre implicite de type pointeur de la classe. La signature decallback()en tant que fonction C estvoid Timer::callback(Timer* this). Mais si on déclare une opération commestatic, alors, sa signature sera exactement telle que spécifiée, comme dans notre casvoid Timer::call_callback(int, siginfo_t*, void*)qui est la signature attendue pour un handler de timer POSIX. - La conséquence est que la fonction
call_callback()n’a pas accès à l’objetTimer(pas d'accès à la variablethis), il faudra donc passer le pointeur de l’objetTimeren paramètre de la fonctioncall_callbacken utilisant la structuresiginfo_tdont l’adresse est passée en 2e paramètre d'un handler POSIX. Le mécanisme à utiliser est indiqué dans le cours.
Pour chaque élément de classe de la figure 2, expliquez pourquoi il est public, privé ou protégé.
Expliquez quelle est l’utilité de la méthode de classe (statique)call_callback().
Spécifiez quelles opérations doivent être définies comme virtuelles.
Implémentez le code de la classeTimeren C++ .
Testez-la en implémentant une classe dérivéeCountDownimprimant à l’écran un compte à rebours à 1 Hz depuis un nombrenjusqu’à0.
Calibration en temps d’une boucle
La figure 3 propose une architecture orientée objets pour refaire l’exercice du TD-1 :
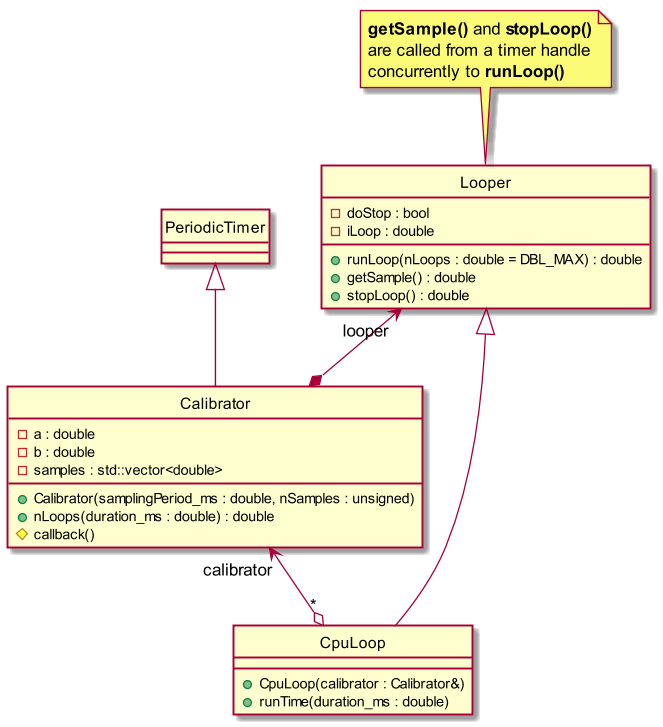
Calibratordérive dePeriodicTimeret implémente une méthodecallback()lui permettant de mesurer les paramètres a et b de l’équation l(t)=a×t+b où l est le nombre de boucles effectuées par la méthodeLooper::runLoop()pendant le temps t.- Cette mesure doit s’effectuer dans le constructeur de
Calibratoret utiliser les méthodesgetSample()etstopLoop()d'un objetLooper. Normalement, il ne doit y avoir qu’une seule instance deCalibratordans votre programme, utilisé par tous les objets de typeCpuLoop. Calibrator::nLoops()est la méthode qui convertit son paramètreduration_msen nombre de boucles grâce à l(t).CpuLoop::runTime(duration_ms : double)fait appel àCalibrator::nLoops()puis appelle la méthoderunLoophéritée deLooper. Chaque instance deCpuLoopest utilisable par une seule tâche dont on veut contrôler le temps d’exécution.
Faites un programme analogue à celui du TD-1 en implémentant et en testant les classes de la figure 3.
